Plugins & The Wiki
Autopilot is integrated with a semantic wiki, a powerful tool that merges human-readable text with computer-readable structured information, and blurs the lines between the two in the empowering interface of a wiki that allows anyone to edit it. The autopilot wiki is available at:
In addition to a system for storing, discussing, and knitting together a library of technical knowledge, the wiki is used to manage Autopilot’s plugin system. The integrated plugin/wiki system is designed to
make it easier to extend and hack existing autopilot classes, particularly Hardware and Task classes, without needing to modify any of the core library code
make it easier to share code across multiple rigs-in-use by allowing you to specify the name of the plugin on the autopilot wiki so you don’t need to manually keep the code updated on all computers it’s used on
make a gentler scaffold between using and contributing to the library – by developing in a plugin folder, your code is likely very close, if it isn’t already, ready to integrate back into the main autopilot library. In the meantime, anyone that is curious
make it possible to encode semantic metadata about the plugin so that others can discover, modify, and improve on it. eg. your plugin might control an array of stepper motors, and from that someone can cherrypick code to run a single one, even if it wasn’t designed to do that.
decentralize the development of autopilot, allowing anyone to extend it in arbitrary ways without needing to go through a fork/merge process that is ultimately subject to the whims of the maintainer(s) (me 😈), or even an approval process to submit or categorize plugins. Autopilot seeks to be as noncoercive as possible while embracing and giving tools to support the heterogeneity of its use.
make it trivial for users to not only contribute plugins but design new types of plugin-like public interfaces. For example, if you wanted to design an interface where users can submit the parameters they use for different tasks, one would only need to build the relevant semantic mediawiki template and form, and then program the API calls to the wiki to index them.
todo— fully realize the vision of decentralized development by allowing plugins to replace existing core autopilot modules…
Plugins
Plugins are now the recommended way to use Autopilot! They make very few assumptions about the structure of your code, so they can be used like familiar script-based experimental tools, but they also encourage the development of modular code that can easily be used by others and cumulatively contribute to a shared body of tools.
Using plugins is simple! Anything inside of the directory indicated by prefs.get('PLUGINDIR') is a plugin! Plugins
provide objects that inherit from Autopilot classes supported by an entry in registry.REGISTRIES .
For example, we want to write a task that uses some special hardware that we need. We could start by making a directory
within 'PLUGINDIR' like this:
plugins
├── my-autopilot-plugin
│ ├── README.md
│ ├── test_hardware.py
│ └── test_task.py
Where within test_hardware.py you define some custom hardware class that inherits from gpio.Digital_Out
from autopilot.hardware.gpio import Digital_Out
class Only_On_Pin(Digital_Out):
"""
you can only turn this GPIO pin on
"""
def __init__(self, pin, *args, **kwargs):
super(Only_On_Pin, self).__init__(pin=pin, *args, **kwargs)
self.set(1)
def set(self, val):
"""override base class"""
if val not in (1, True, 'on'):
raise ValueError('This pin only turns on')
else:
super(Only_On_Pin, self).set(val)
def release(self):
print('I release nothing. the pin stays on.')
You can then use it in some task! Autopilot will use its registry autopilot.get() methods to find
it after importing all your plugins. For example, we can refer to it as a string in our HARDWARE dictionary in our special task:
from datetime import datetime
import threading
import numpy as np
from autopilot.tasks import Task
from tables import IsDescription, StringCol
class My_Task(Task):
"""
I will personally subject myself to the labor of science and through careful hours spent meditating on an LED powered by an unsecured Raspberry Pi with the default password i will become attuned to the dance of static pixels fluctuating on the fundamentalfrequencies of ransomware and ssh bombardment to harnessthe power of both god and anime
"""
PARAMS = {'infinite_light': {
'tag': 'leave the light on indefinitely? are you sure you want to leave the rest of the world behind and never cease your pursuit of this angelic orb?',
'type': 'bool'}}
HARDWARE = {'esoterica': {'the_light': 'Only_On_Pin'}}
class TrialData(IsDescription):
ontime = StringCol(26)
def __init__(self, infinite_light:bool=True, *args, **kwargs):
super(My_Task, self).__init__(*args, **kwargs)
self.init_hardware()
self.hardware['esoterica']['the_light'].set(True)
if not infinite_light:
infinite_light = True
self.infinite_light = infinite_light
self.stages = [self.only_on]
def only_on(self):
self.stage_block.clear()
if not self.infinite_light:
threading.Timer(np.random.rand()*10e100, self.cease_your_quest).start()
return {'ontime': datetime.now().isoformat()}
def cease_your_quest(self):
self.stage_block.set()
self.hardware['esoterica']['the_light'].release()
Both your hardware object and task will be available to the rest of Autopilot, including in the GUI elements that let you easily parameterize and assign it to your experimental subjects.
Todo
We are still working on formalizing the rest of a plugin architecture, specifically dependency resolution among python packages, autopilot scripts, and dependencies on other plugins. All this in time! For now the wiki asks for a specific autopilot version that a plugin supports when they are submitted, so we will be able to track plugins that need to be updated for changes in the plugin API as it is developed.
Registries
Plugins are supported by the functions in the utils.registry module. Registries allow us to make definite but
abstract references to classes of objects that can therefore be extended with plugins.
Since for now Autopilot objects are not guaranteed to have a well-defined inheritance structure, registries are available
to the classes of objects listed in the registry.REGISTRIES enum. Currently they are:
class REGISTRIES(str, Enum):
"""
Types of registries that are currently supported,
ie. the possible values of the first argument of :func:`.registry.get`
Values are the names of the autopilot classes that are searched for
inheriting classes, eg. ``HARDWARE == "autopilot.hardware.Hardware"`` for :class:`autopilot.Hardware`
"""
HARDWARE = "autopilot.hardware.Hardware"
TASK = "autopilot.tasks.Task"
GRADUATION = "autopilot.tasks.graduation.Graduation"
TRANSFORM = "autopilot.transform.transforms.Transform"
CHILDREN = "autopilot.tasks.children.Child"
SOUND = "autopilot.stim.sound.sounds.BASE_CLASS"
Each entry in the enum refers to the absolute package.module.class name of the topmost metaclass that is to be searched.
The autopilot.get() method first gets the base class with find_class(), ensures that
plugins have been imported with import_plugins() , and searches for a subclass with a matching name
with recurse_subclasses() . If none is found in the currently imported files, it parses the ast
of any files below the base class in the path hierarchy. The distinction is because while we do assume that we can
import anything we have made/put in our plugins directory, we currently don’t make that assumption of the
core library of autopilot – we want to be able to offer the code for tasks and hardware that have diverse dependencies
while giving ourselves some protection against writing squirrelly edge cases everywhere.
In practice, anywhere you go to make an explicit import of an autopilot class that is suported by a registry, it is good
practice to use autopilot.get instead. It is called like:
# autopilot.get('registry_name', 'object_name')
# eg.
autopilot.get('hardware', 'Digital_Out')
Note how the registry name is not case sensitive but the object name is. There are a few convenience methods/calling patterns here too. Eg. to list all available objects in a registry:
autopilot.get('hardware')
or to list just a list of strings instead of the objects themselves:
autopilot.get_names('hardware')
or you can pass an object itself as the registry type in order to only find subclasses of that class:
GPIO = autopilot.get('hardware', 'GPIO')
autopilot.get(GPIO)
Todo
In the future, we will extend registries to all autopilot objects by implementing a unitary inheritance structure. This will also clean up a lot of the awkward parts of the library and pave the way to rebuilding eg. the networking modules to be much simpler to use.
That work will be the defining feature of v0.6.0, you can track progress and contribute by seeing the relevant issue: https://github.com/auto-pi-lot/autopilot/issues/31
as well as the issues in the v0.6.0 milestone: https://github.com/auto-pi-lot/autopilot/milestone/2
The Wiki API
The wiki’s semantic information can be accessed with the functions in the utils.wiki module.
Specifically, we make a function that wraps the Semantic Mediawiki Ask API that consists of a
query or a set of filters that select relevant pages using their categories and properties, and then
the properties to retrieve from those pages.
You can see a list of the categories and properties that can be used on the wiki.
For Filters:
Both types of filters are specified with the
[[Double Brackets]]of mediawikiCategories are specified with a single colon [1] like
[[Category:Hardware]]Properties are specified with double colons, and take a property and a value like
[[Created By::Jonny Saunders]]
The queried properties are specified with a list of strings like ['Has Datasheet', 'Has STL']
So, for example, one could query the manufacturer, price, and url of the audio hardware documented in the wiki like:
from autopilot.utils import wiki
wiki.ask(
filters=[
"[[Category:Hardware]]",
"[[Modality::Audio]]"
],
properties=[
"Manufactured By",
"Has Product Page",
"Has USD Price"
]
)
which would return a list of dictionaries like:
[{
'Has Product Page': 'https://www.hifiberry.com/shop/boards/hifiberry-amp2/',
'Has USD Price': 49.9,
'Manufactured By': 'HiFiBerry',
'name': 'HiFiBerry Amp2',
'url': 'https://wiki.auto-pi-lot.com/index.php/HiFiBerry_Amp2'
},
{
'Has Datasheet': 'https://wiki.auto-pi-lot.com/index.php/File:HiVi-RT13WE-spec-sheet.pdf',
'Has Product Page': 'https://www.parts-express.com/HiVi-RT1.3WE-Isodynamic-Tweeter-297-421',
'Has USD Price': 37.98,
'Is Part Type': 'Speakers',
'Manufactured By': 'HiVi',
'name': 'HiVi RT1.3WE',
'url': 'https://wiki.auto-pi-lot.com/index.php/HiVi_RT1.3WE'
}]
These functions can be used on their own to provide interactive, programmatic access to the wiki, but maybe more importantly it serves as a bridge between the wiki and Autopilot’s software. By building API calls into the various modules of autopilot that can query structured information from the wiki, the software can be made to take advantage of communally curated experimental and technical knowledge.
Additionally, since it is relatively simple to create new templates and forms (see the Page Forms
and Page Schemas extensions that are used to create and
manage them)t o accept different kinds of submissions and link them to the rest of the wiki, and the plugin and
registry system allow anyone to build the classes needed to take advantage of them, it becomes possible for anyone to
create new kinds of public knowledge interfaces to autopilot. For example, if there was desire to share and describe parameterizations of
a particular Task along with summaries of the data, then it would be possible to make a form and template on the
wiki to accept them, and provide a GUI plugin to select empirically optimal parameters for a given outcome measurement ,
which would make all the hard-won rules of thumb and superstition that guides a lot of the fine decisions in behavioral research obsolete
in an afternoon.
The use of the wiki to have communal control over plugins and interfaces makes it possible for us to move autopilot to a model of decentralized governance where the “official” repository becomes one version among many, but the plugins remain integrated with the system rather than live on as unrelated forks.
Plugins on the Wiki
Autopilot plugins can be found on the wiki here: https://wiki.auto-pi-lot.com/index.php/Autopilot_Plugins
(at the moment the cupboard is relatively bare, but it always starts that way.)
Within Autopilot, you can use the utils.plugins.list_wiki_plugins() function to list the available functions
and return their basic metadata, which is a very thin wrapper around utils.wiki.ask()
To submit new plugin, one would use the relevant form: https://wiki.auto-pi-lot.com/index.php/Form:Autopilot_Plugin
So we might submit our plugin “Fancy New Plugin” (by entering that on the form entry page), and filling in the fields in the form as requested:
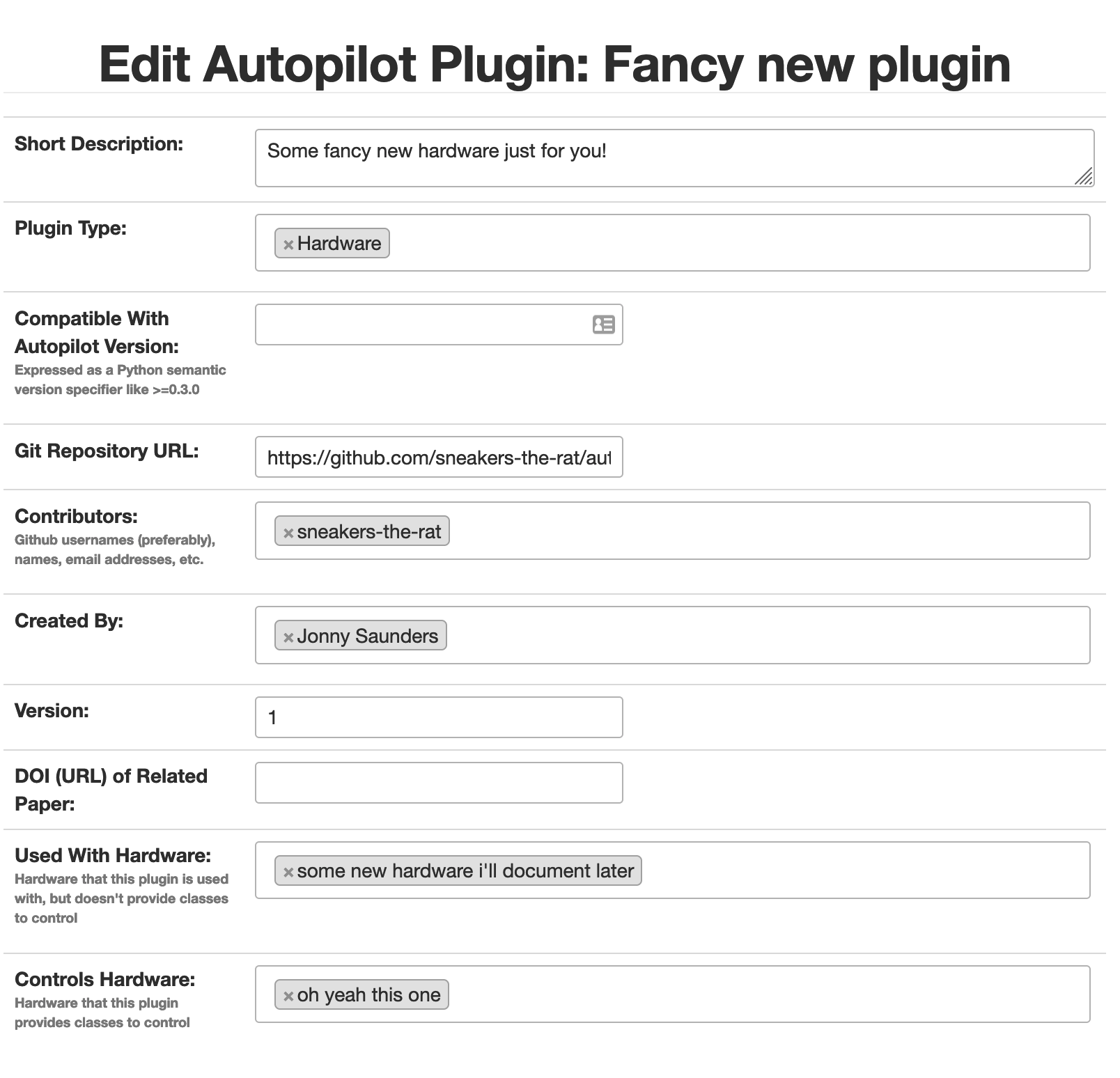
Where we provide a description and other metadata – most important some git repository url – that describes the plugin. There are free text fields where appropriate, but also autocompleting token fields that let us keep some semblance of consistency in the semantic links we create. At the end you are then given a free-text field that accepts all common wiki markup as well as free declaration of any semantic links that aren’t asked for in the form.
After you submit, it’s immediately available in the gui.Plugins manager!
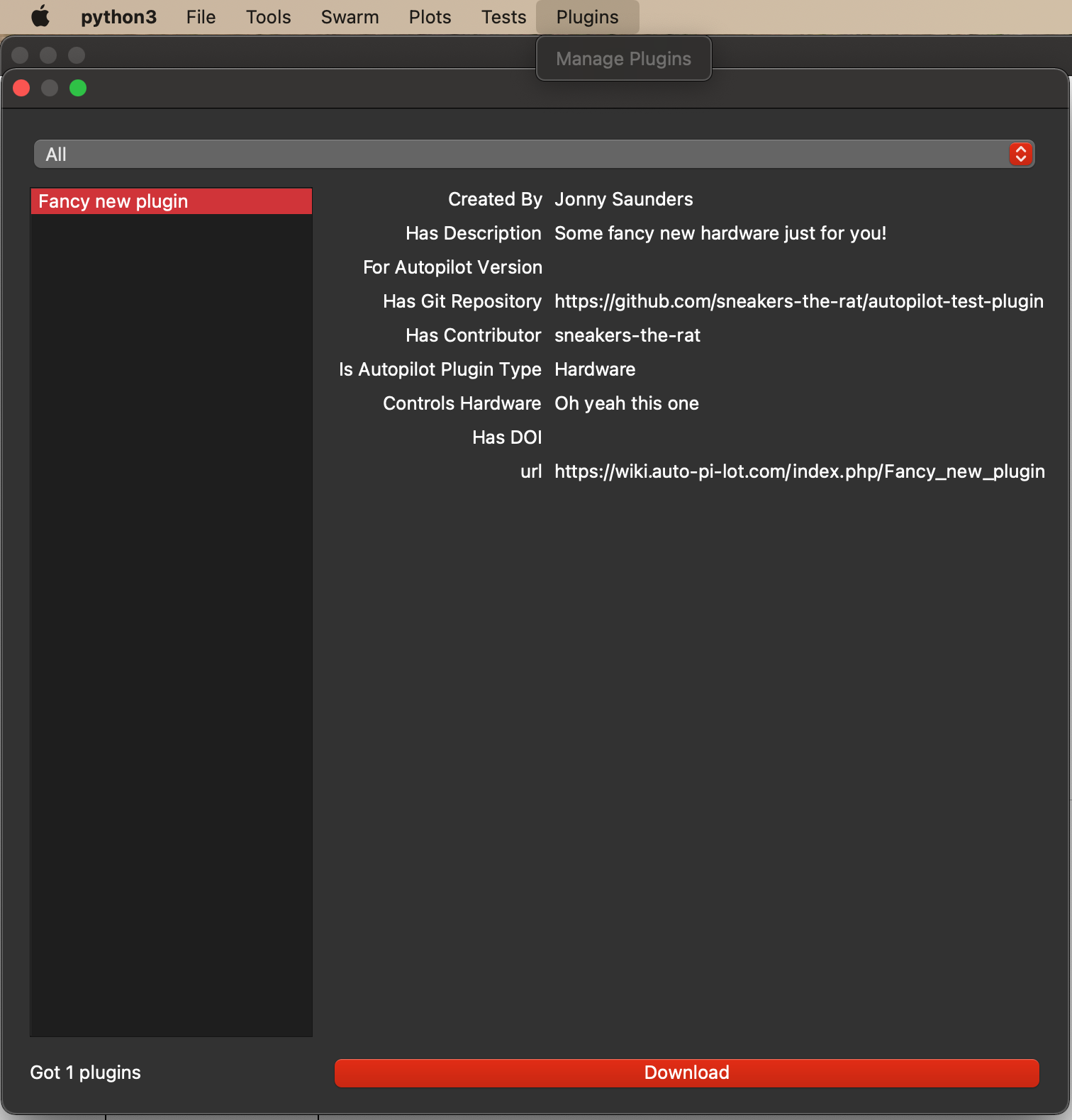
Each plugin has one or multiple Plugin Type(s) that corresponds to a particular entry in REGISTRIES
for filtering plugins that provide different types of objects.
Todo
Currently the plugin manager is just a proof of concept, though it would require relatively little to add a
routine to clone the git repo into the plugins directory, as mentioned above, we are working on integrating
dependency management in a way that’s unified throughout the package (instead of, say, needing to manually run
python -m autopilot.setup.run_script picamera to enable the camera, objects are able to specify and
request that their dependencies be met automatically).
For now just git clone <plugin_url> ~/autopilot/plugins or wherever your PLUGINDIR is!